Tal y como prometí voy a explicar cómo hice la animación de los movimientos de la retroexcavadora.
Partimos de que tras hacer el ensamblaje la base puede girar sobre su eje y los pistones se mueven concentricos a sus respectivos cilindros haciendo mover el resto del conjunto.
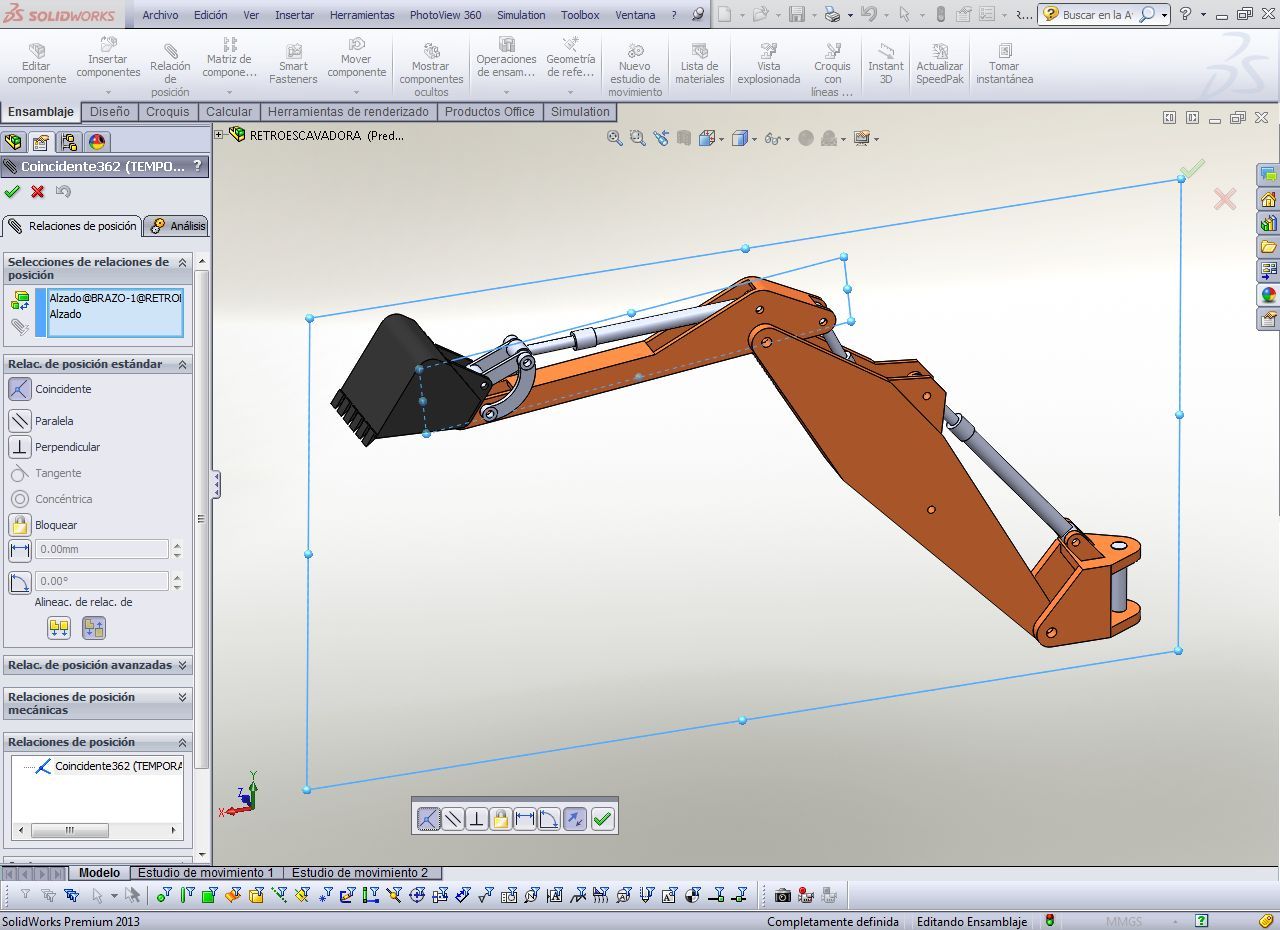
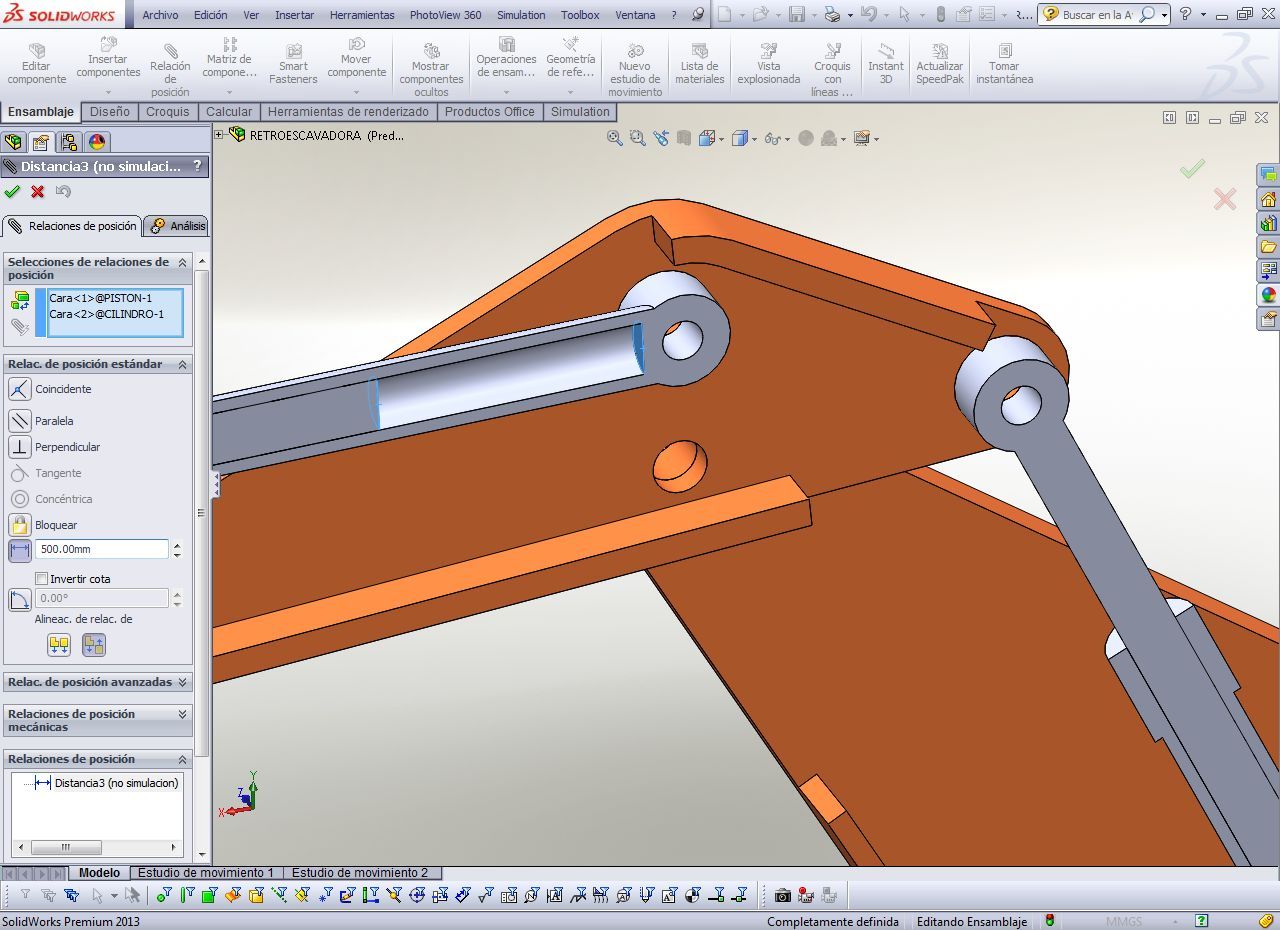
Lo primero que vamos a hacer, además de las restricciones de partida, es añadir una serie de restricciones para marcar el punto de inicio de la animación (luego las quitaremos a la hora de animar). Para ello he creado una restricción de coincidencia entre el plano de alzado del brazo y el del ensamblaje y otras de distancia entre caras de cilindros y pistones. Repito que la única finalidad de estas restricciones es marcar un punto de inicio. Nota: estas restricciones también se pueden crear en la pantalla de "estudio de movimiento" en vez de la de "Modelo" con lo que aparecerán como local pero igualmente las deberemos suprimir antes de animar.
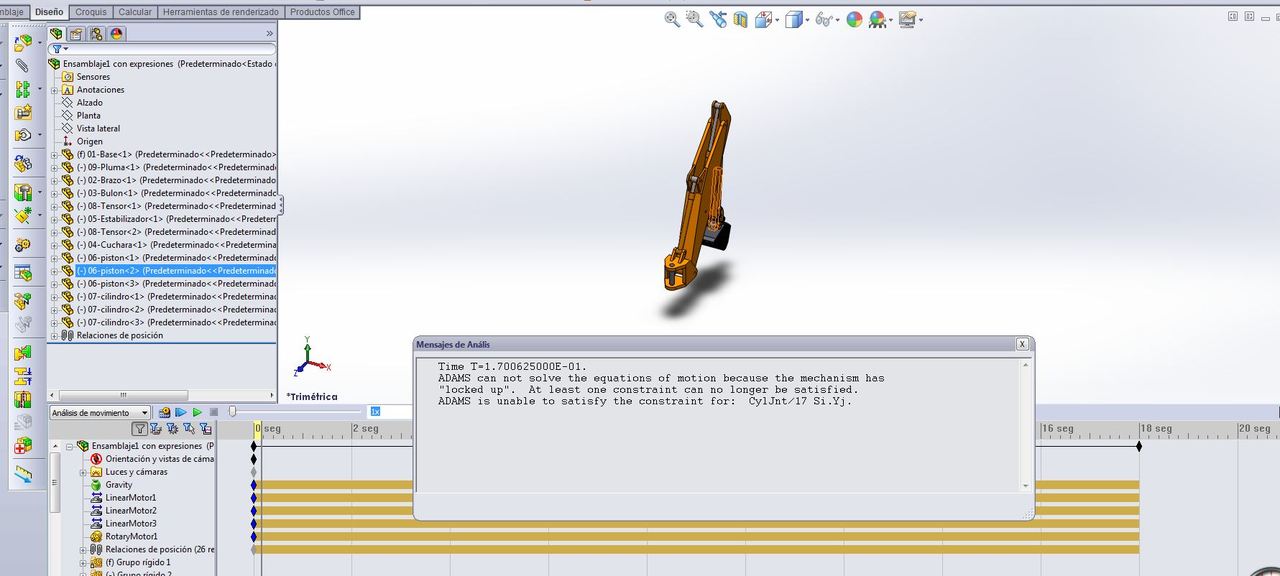
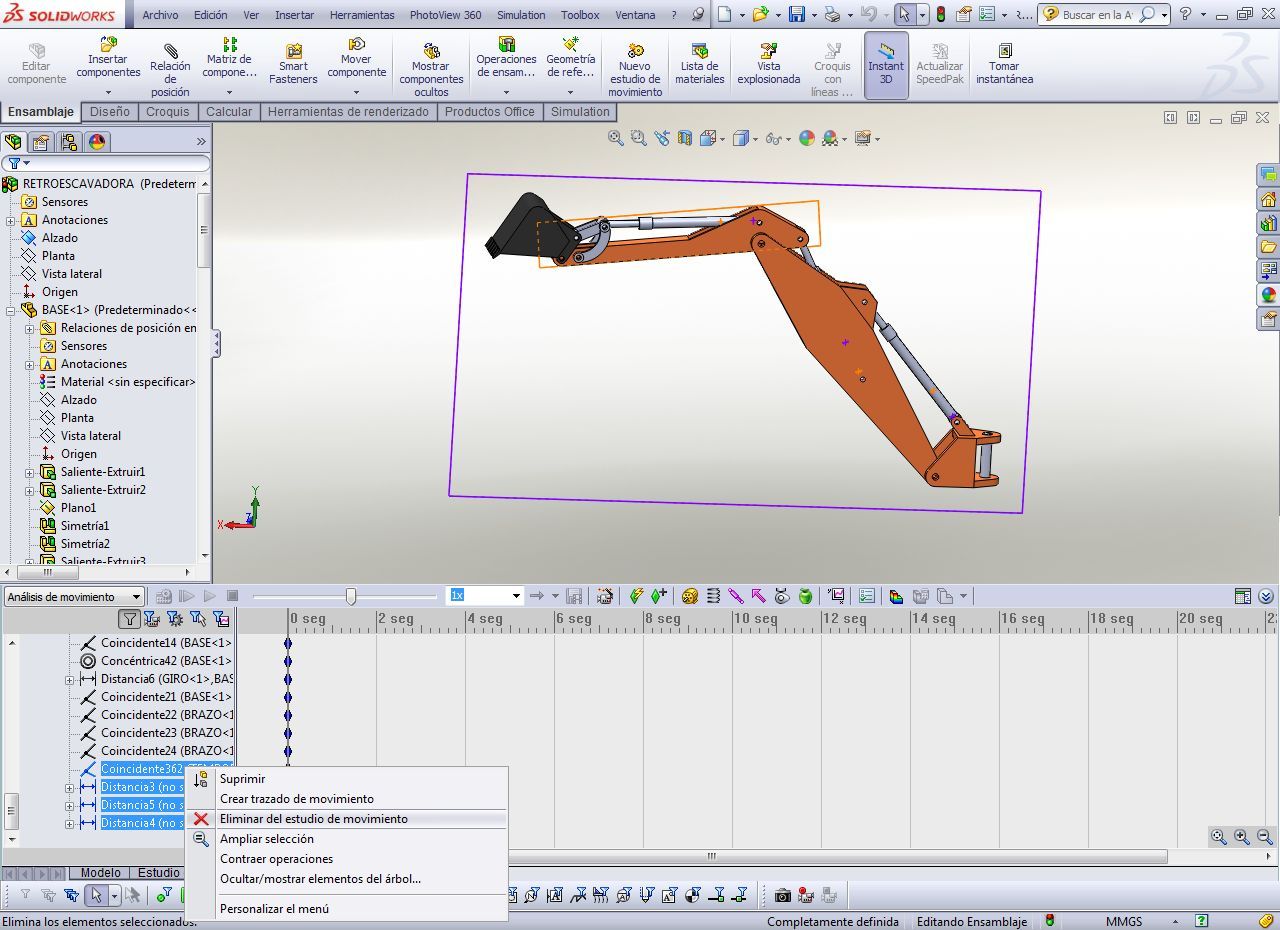
Ahora vamos a la ventana de “estudio de movimiento” para crear un “Análisis de movimiento”. Una vez aquí buscamos las 4 restricciones que hemos hecho en el paso anterior y o bien las suprimimos o bien las eliminamos del estudio de movimiento. Ambas opciones darían el mismo resultado ya que no estarían activas para lo que vamos a hacer (si solo las suprimimos las podríamos volver a activar si lo necesitásemos)
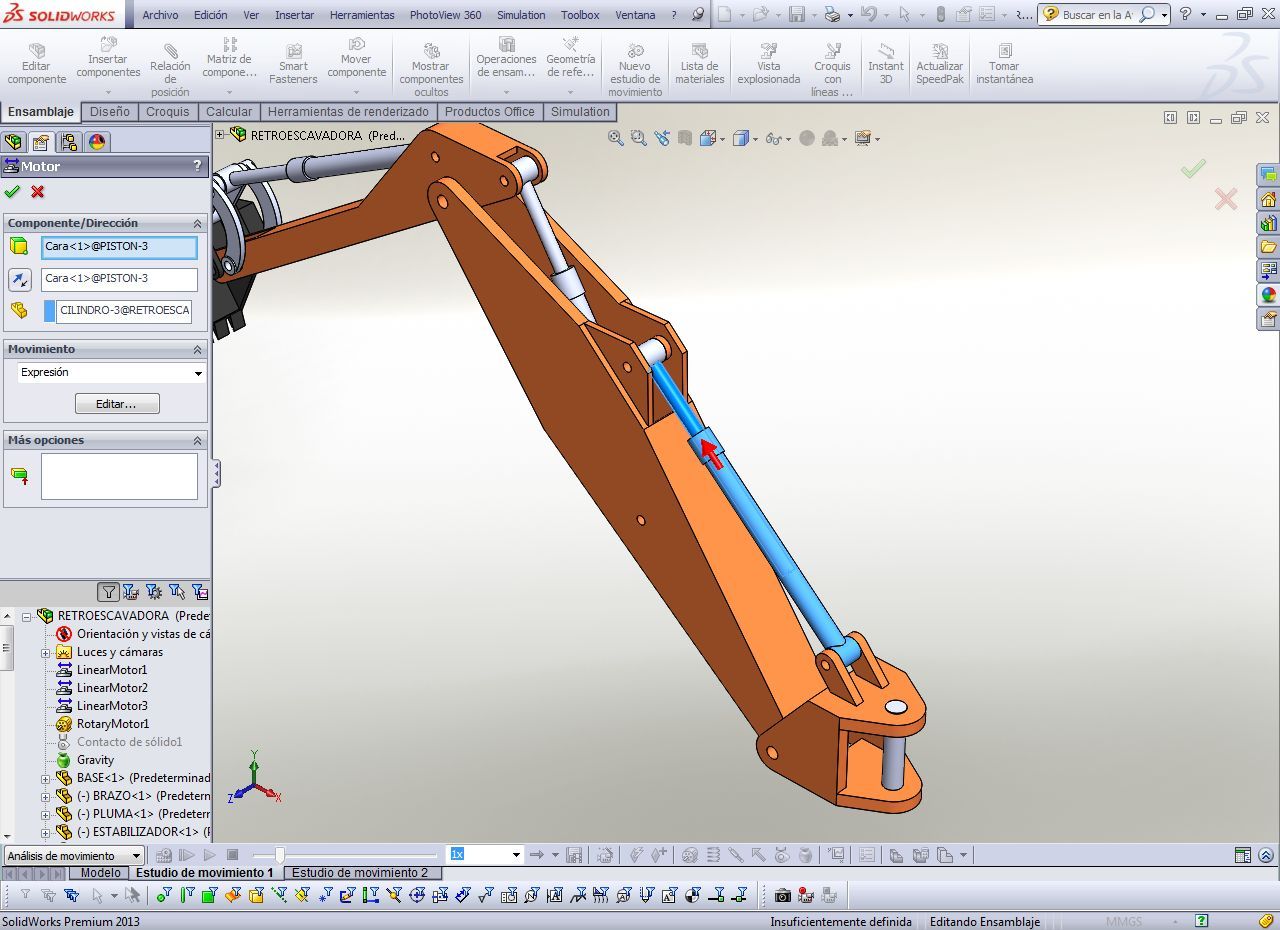
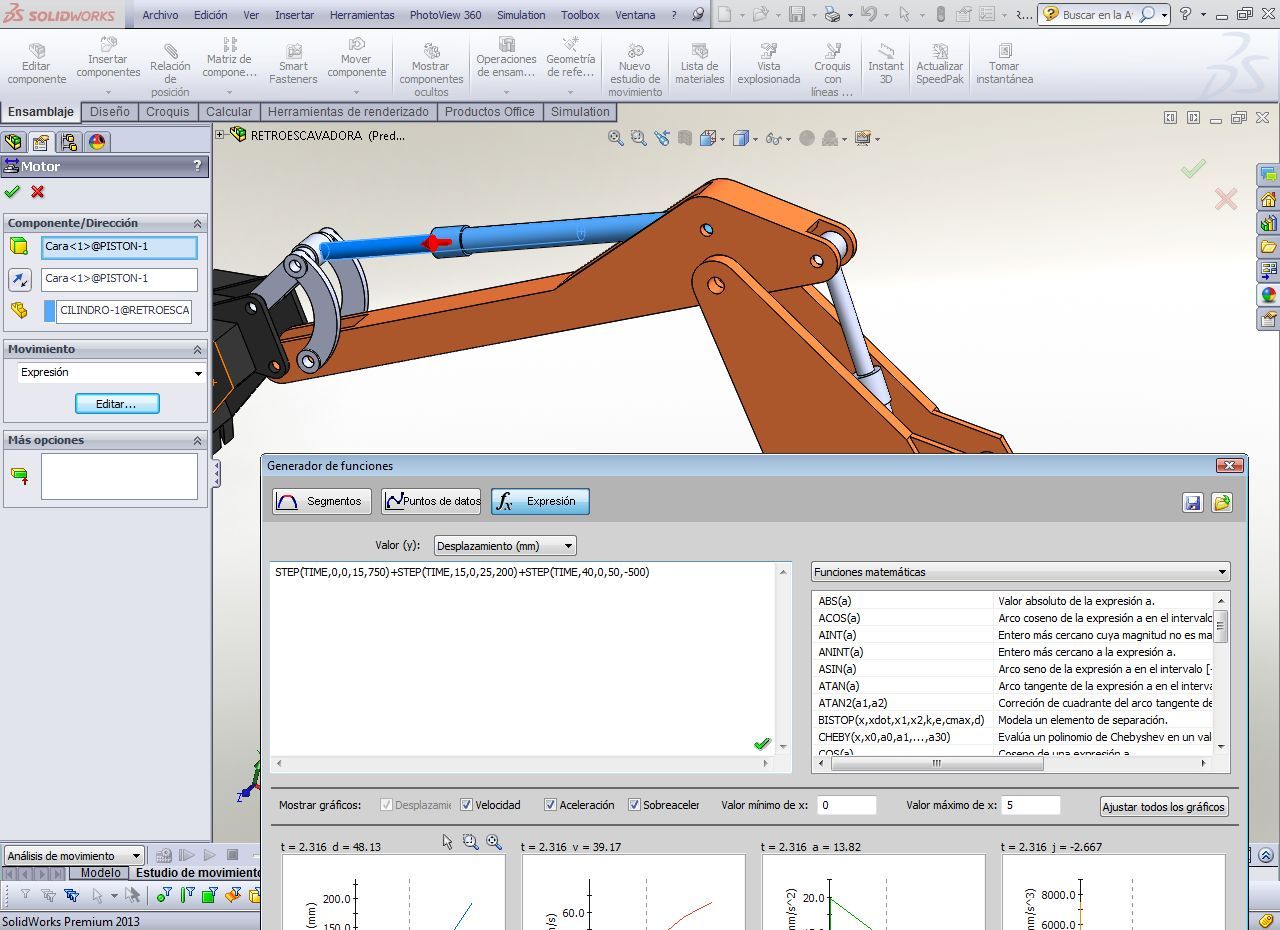
Ahora empezamos a meter los motores lineales que harán actuar a los cilindros. Usaremos la expresión STEP (paso) asociada al tiempo para definir sus movimientos:
STEP (TIME, x1, y1, x2, y2)
Siendo:
x1= hora de inicio del desplazamiento (en segundos)
y1= valor del desplazamiento en el valor x1.
x2= hora de finalización del desplazamiento
y2= valor del desplazamiento en el valor x2.
Si introducimos mas de un paso el valor del desplazamiento en los sucesivos pasos es relativo al paso anterior por lo que el valor y1 siempre será cero (y1=0)
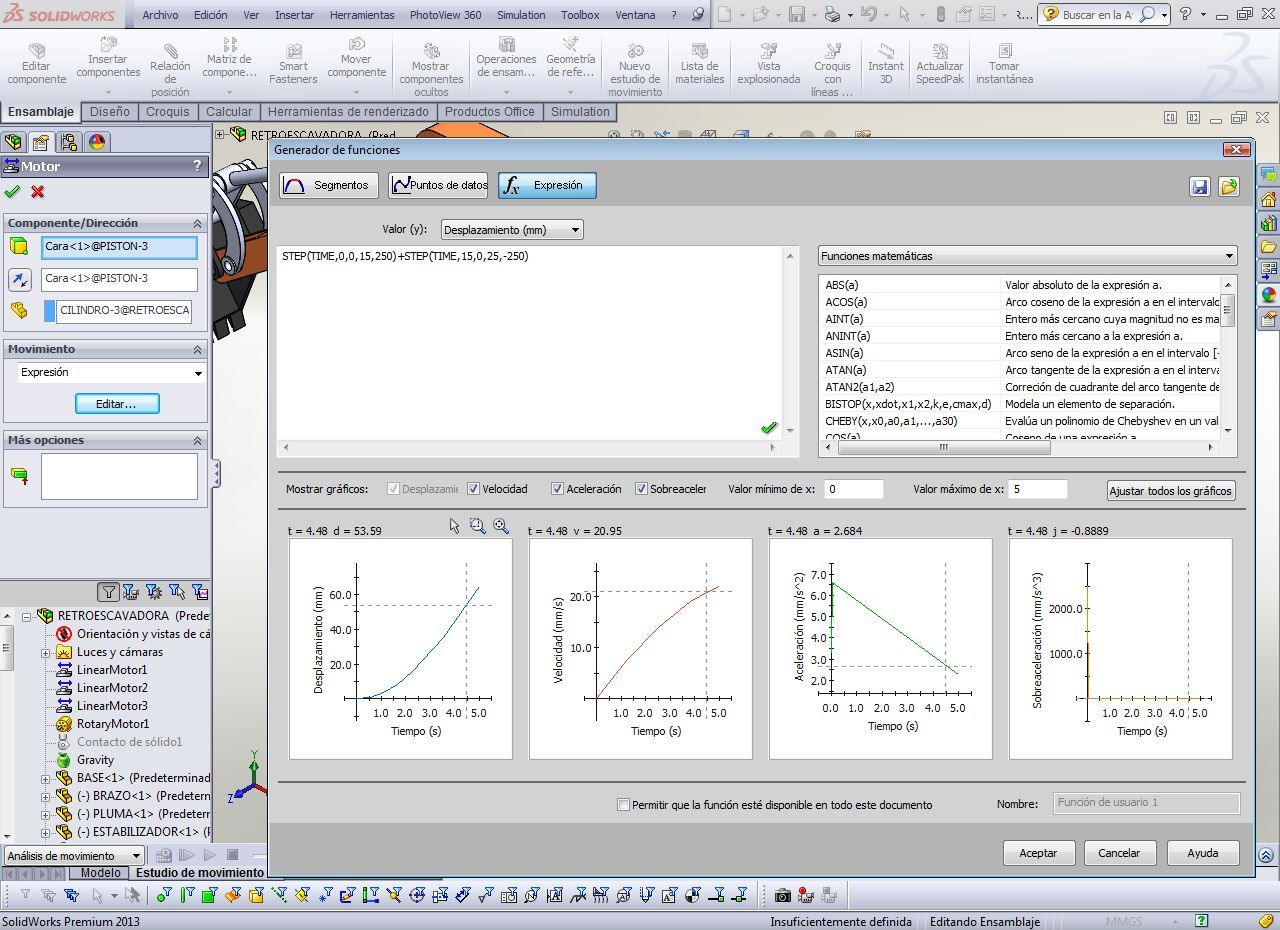
Si analizamos la expresión introducida en el cilindro3 tenemos (siendo T=tiempo [seg] y d=desplazamiento [mm]:
STEP(TIME,0,0,15,250)+STEP(TIME,15,0,25,-250)
Paso 1: para T=0seg el cilindro está en la posición inicial d=0mm y en el T=15seg de ha desplazado d=250mm
Paso 2: para T=15seg está en la posición d=0mm (recordar que los desplazamientos son relativos a la última posición alcanzada) y en el T=25seg retrocede d=250mm (signo negativo)
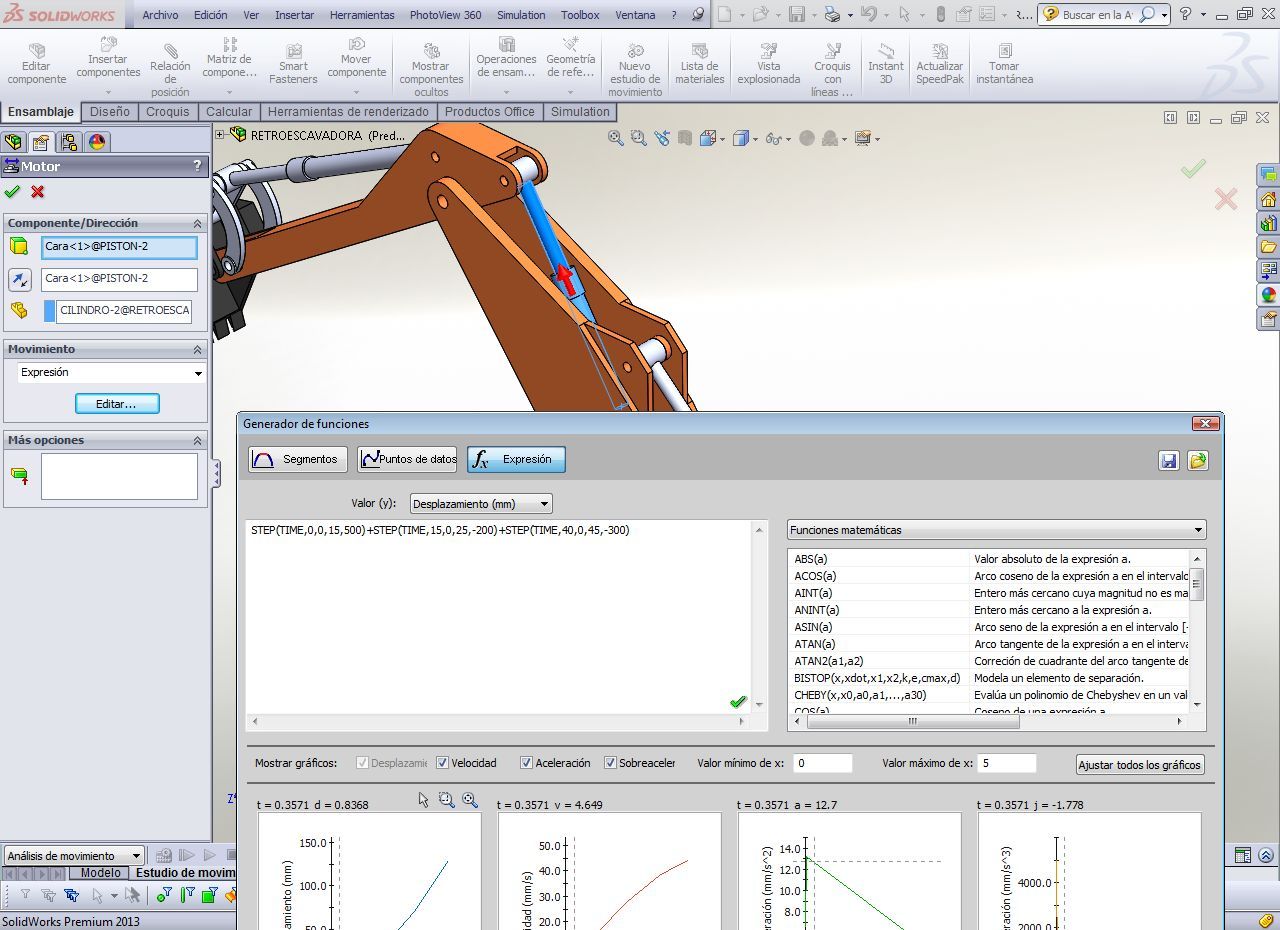
Según esto introducimos los motores lineales y las expresiones correspondientes a los otros dos cilindros.
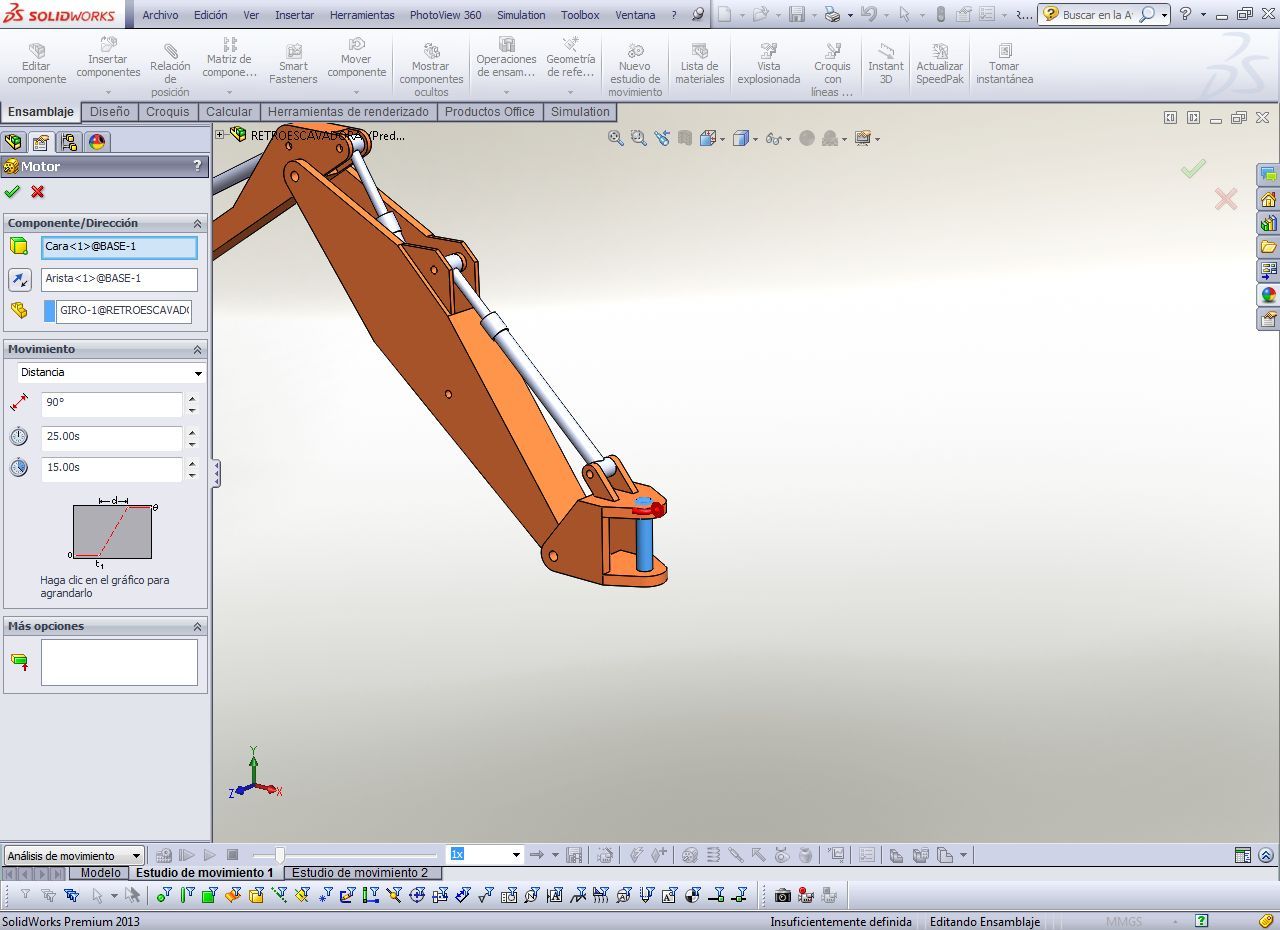
Añadimos un motor rotatorio para que gire. En este caso es mas sencillo expresar el movimiento seleccionando la opción “distancia” e introduciendo el angulo que queremos que gire, la hora de comienzo y la duración.
Por último añadimos gravedad al estudio.
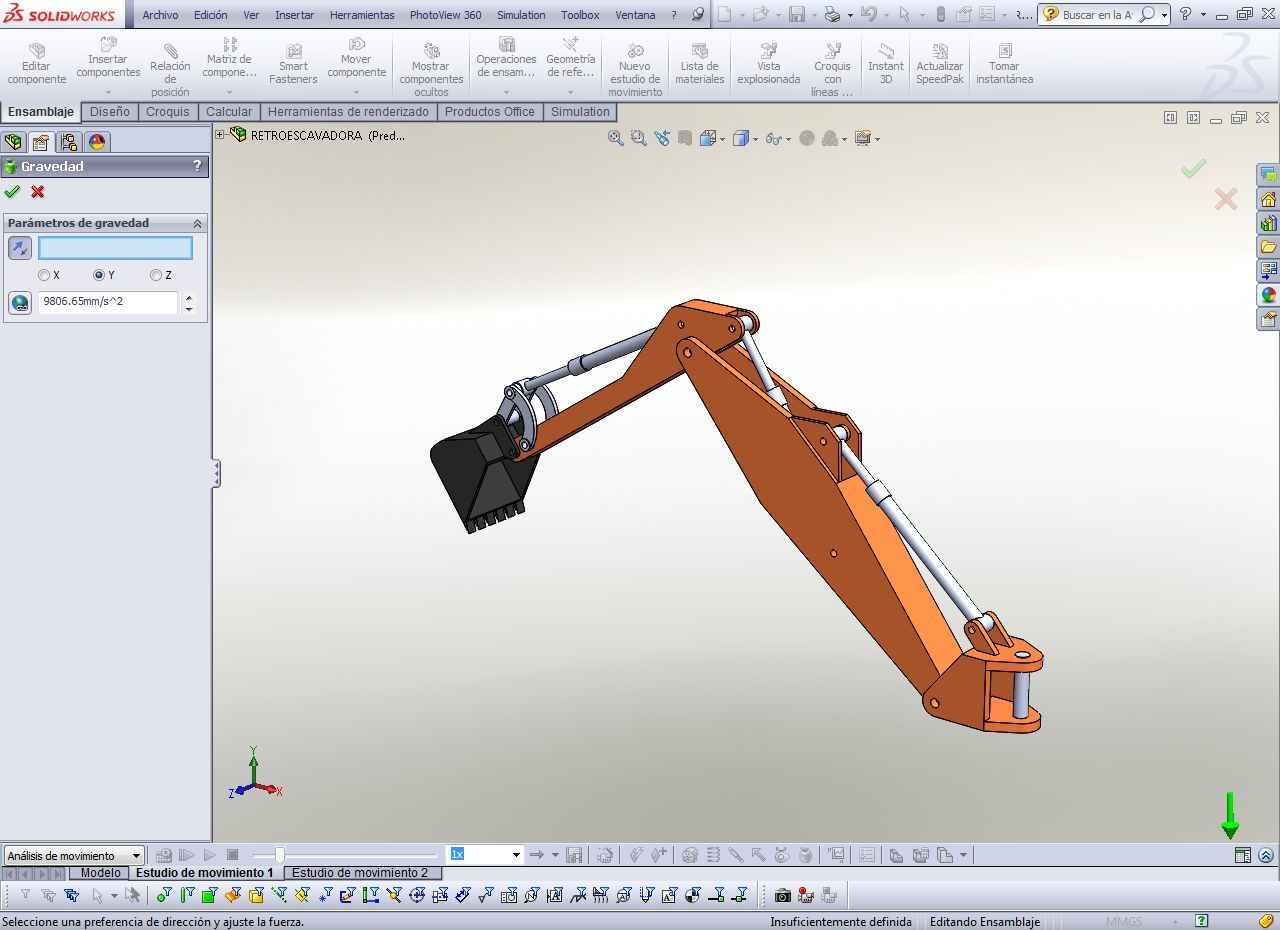
Damos a calcular y nos debería salir la simulación.
Para hacer que la cuchara recoja los bultos se posicionan en el Modelo mediante relaciones de coincidencia entre caras que luego de suprimen al hacer la animación (el contenedor lógicamente deberá estar fijado completamente ya que sino se caería debido a la fuerza de gravedad). Luego aplicamos un "contacto3D" entre los bultos, contenedor y cuchara. A mi me costó un rato que cayera uno dentro de la cuchara  . El bulto que recoge y luego suelta tiene un contacto3D entre él y una pieza que hace de suelo que está oculta (sino caería al abismo...)
. El bulto que recoge y luego suelta tiene un contacto3D entre él y una pieza que hace de suelo que está oculta (sino caería al abismo...)
Espero que quede claro. Es mas fácil de lo que parece  .
.
Saludos