Es muy sencillo.
pasos.
- hacer la cinemática.
a. join prismático para desplazamiento de los prismas por las guías.
b. esos prismas tienen un agujero que lo utilizo como conexión para el brazo. por lo tanto, join de conexión revoulute entre brazo y agujeros de los prismas.
c. para que se genere la cinemática, uno de los comandos debe tener la propiedad de motor (por así llamarlo, para que se entienda, es decir, debe generar movimiento, porque las cosas no se mueven solas sin un "algo" que lo empuje. entonces, ese join se convierte en command.
d. imprescindible fijar uno de los elementos, como en assembly, porque de no hacerlo, el mecanismo no es considerado completo o terminado, porque se movería alegremente por el espacio del universo. ja ja ja.
nota1. he dado revolute y no cilindrical para fijar una distancia, porque el cilindrical tiene un grado de libertad de mas que es el desplazamiento libre en la dirección del eje.
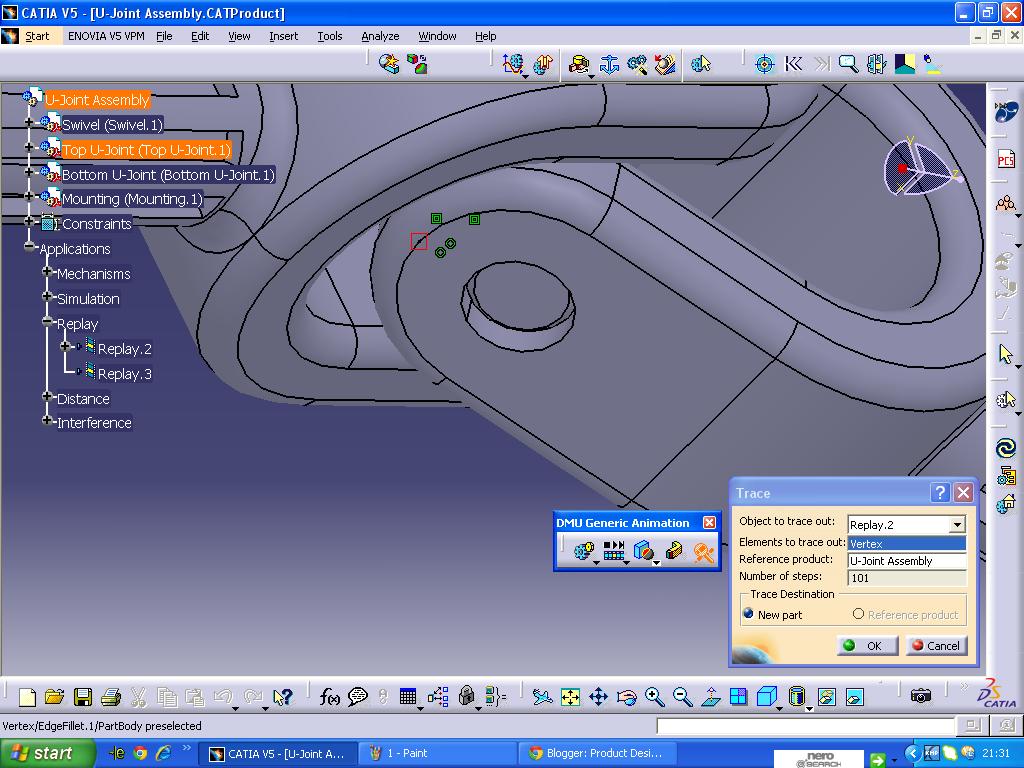
- generas una simulación para definir el numero de pasos o puntos en el traze.
- una vez tengamos la cinemática, funcionando, hacemos un "traze". Ese trace nos da, previa indicación de un punto (el que define la curva de recorrido) esa curva como un nuevo "part", Ese part tiene la curva y un numero determinado de puntos (que son los que definen la curva) dependiendo del numero de pasos en la simulación.
- abres el "part" y ocultas los puntos.
- insertas el part "tan solo es la curva que estabas buscando" como he explicado en el paso anterior. y eso es todo.
nota2. si no ocultas los puntos, verás una guarrería que no hay quien lo mire. esos puntos, por lo general son muy grandes (depende del tamaño del dibujo"
NOTA. si tienes alguna duda, pregúntame y te aclaro lo que no se entienda.
estos pasos los he escrito en el propio editor del foro y no se que tan claro está la explicación. los manuales los hago en word o algun otro editor de texto, con pausa, pensando bien las palabras y con el programa abierto para ver cada uno de los pasos antes de escribir, porque se me puede haber pasado algo por alto.