Hola Ivalzueta, me has tenido intrigado con lo de que no puedes crear un rack joint... si le has echado un ojo al post de esta misma sección, (catia), de fgs: kinematic corredera catia te habrás dado cuenta que un rack-joint NO es una orden dual, (entre dos piezas), sino entre TRES piezas que se interrelacionan de dos en dos entre si, esto se hace para crear un "ratio" entre dos ruedas dentadas o entre una rueda o un circulo y algo plano, una linea, una cremallera o UN SUELO.... osea para que giren a la par: con la misma proporción. En tu caso tu tienes TRES objetos: el chasis de la silla, la rueda (solo una, ya que la segunda la acoplaremos con un dressup a la primera), y el suelo.
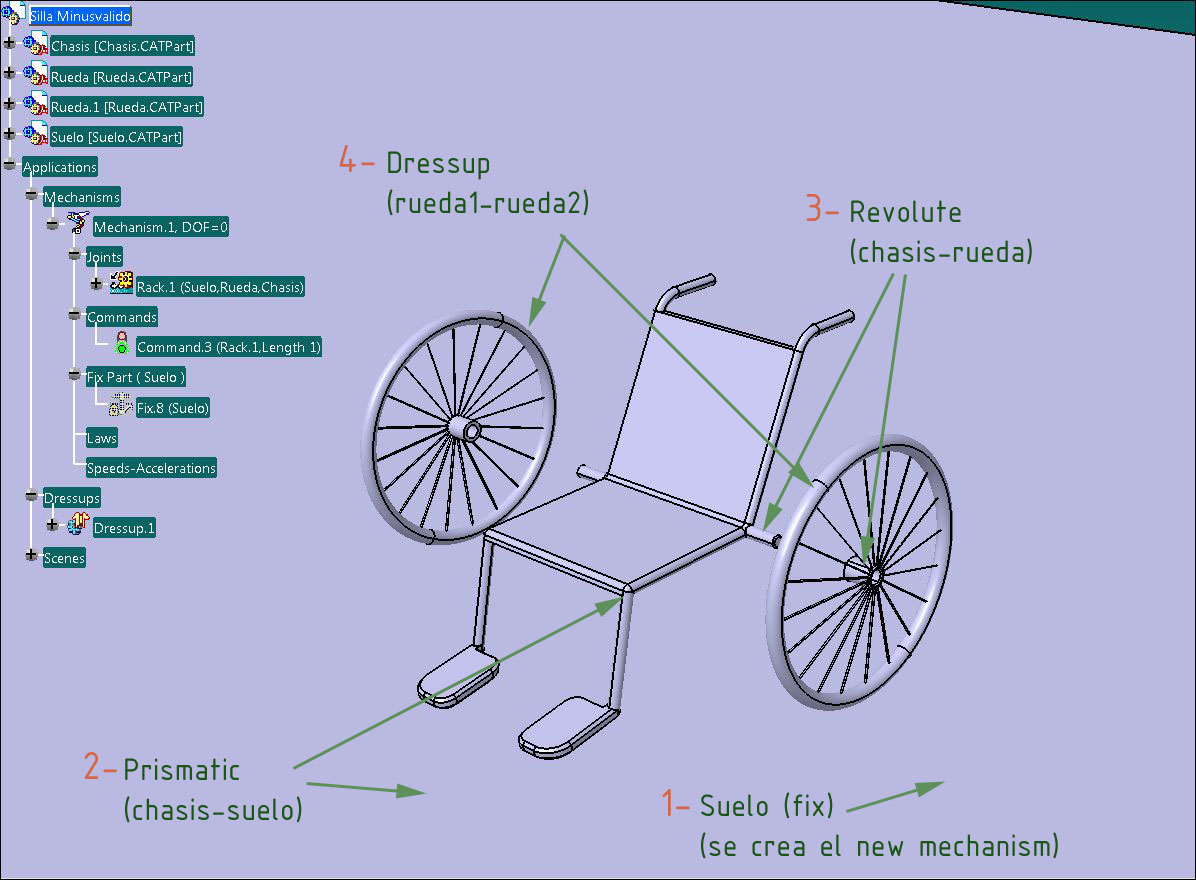
PRIMERO: fijamos el suelo (fix-ancla-) y con ello creamos un nuevo mecanismo.
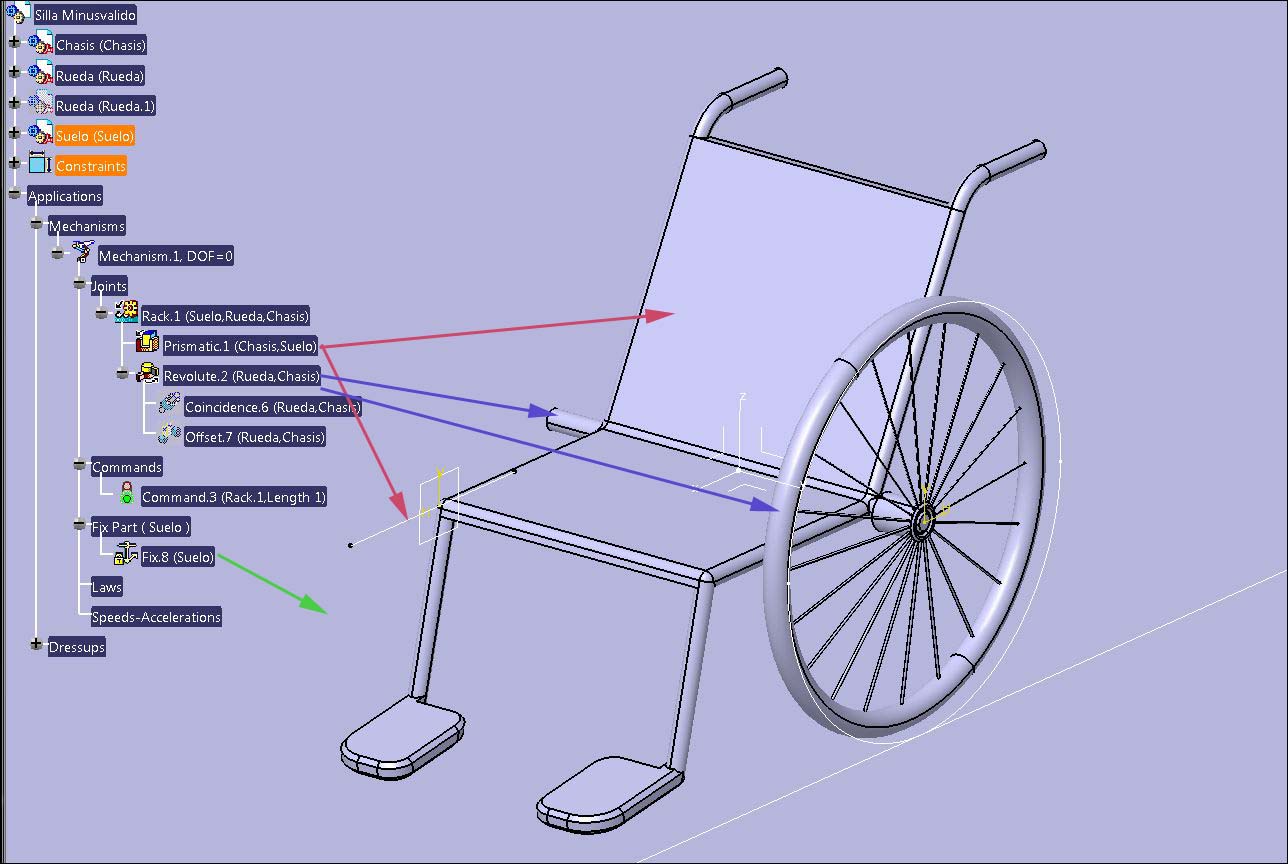
SEGUNDO: creamos un Rack-joint, (prismatic-revolute), donde nos pedirá que interrelacionen nuestros tres elementos:(suelo, chasis y rueda).
Código: Seleccionar todo
--Creamos el prismatic entre el suelo y el chasis.(create las lineas y planos coincidentes que sea menester en dichos objetos).
--Creamos el revolute entre el chasis y la rueda.(create las lineas y planos coincidentes que sea menester en dichos objetos).
--Sin salir de la orden le damos un ratio (clicamos en el círculo exterior de la rueda).
--Sin salir de la orden le damos un motor (joint) de distancia o giro.
--Relacionamos con un dressup la copia de la rueda, (la segunda rueda). (eso lo puedes hacer después).
...y voilá: el mecanismo ya puede ser simulado.
he hecho la simulación del movimiento en uno de mis blogs, espero que te haya resuelto alguna duda.
el ciri