Saludos.
Vaya con mis buenos amigos... Que atentos. No se os escapa una, eh? Pues sí. Se os ha escapado; creo. Repasemos:
¿Recordáis el objetivo de Fgs?
Fgs escribió:pregunta 1. con subproduct, como aplico restricciones entre elementos.
pregunta 2. si no se meten subproduct, como hago las copias de los subproduct.
Yo había aplicado cinemáticas en desarrollo de producto. Situaciones reales que se resuelven sin sub ensamblajes. Y si eran necesarios los sub ensamblajes, se podían comprobar usando la cinemática que permite el assembly y los ensamblajes flexibles. No me había encontrado con la necesidad de hacer simulaciones de esa índole desde el módulo Kinematics. Pero...
Fgs escribió:Alguno más que luna sabe kinematic, pero no se atreve a opinar. Me gustaría más opiniones, para intentar resolverlo.
y me puse a ello.
Me pareció entender que Fgs tenía dudas respecto de los 
Ya se explicó, pero quise volver a hacerlo y además intentar resolver la parte de Kinematics.
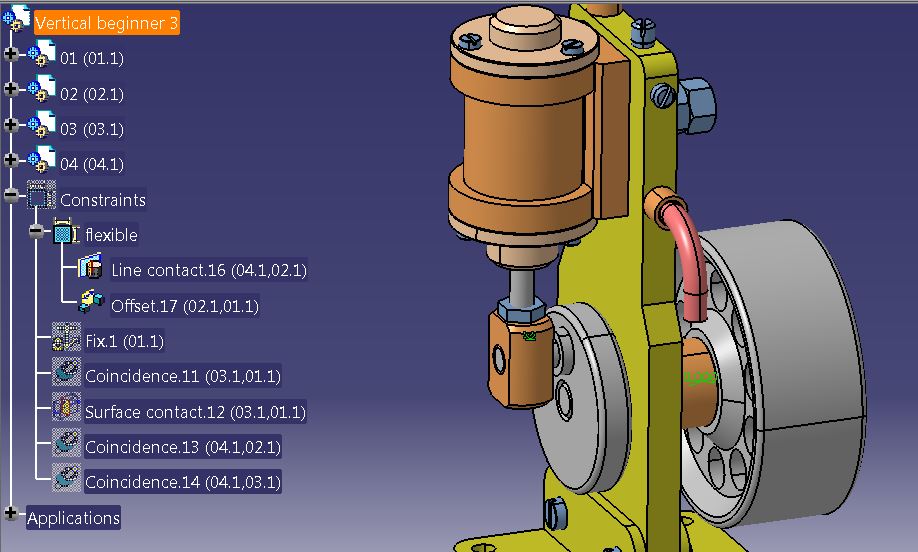
Efectivamente fui capaz, como muestra el vídeo, de mover con el compás el cigüeñal y los 4 cilindros (flexibles, si no, no) con la idea de comprender la diferencia.
Cuando llegué a Kinematics, tuve los mismos problemas que Fgs. No se puede, o no supe, crear las joints entre elementos del sub conjunto. Y digo bien porque las restricciones ya existen, pero no sirven.
Fgs escribió:solo has utilizado un joint para hacerlo girar, la revolucion, y de ese modo, está disfrazado de monaguillo pero lleva el buzo de mecanico
Como he explicado, no uso la joint para girarlo. Uso la restricción de concentricidad. Y el compás. Probad a hacerlo directamente.
Seguiré buscando cómo...
Saludos.