Hola Champi, aquí estoy otra vez de nuevo a tratar de resolver tus dudas. El tema es mas complejo de lo que a simple vista parece y podríamos estar muchas horas intercambiando opiniones e ideas sobre el tema.
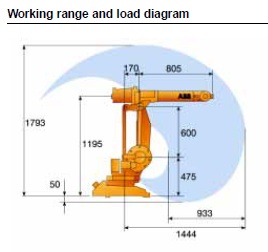
Calcular la zona máxima de trabajo de un robot es bastante complejo, por no decir imposible. Un robot puede adoptar infinidad de posturas y en algunas no podrá hacerlo debido a que colisionarían sus ejes. Cuando vas a mecanizar una pieza, no sabes que posición van a tener los ejes con respecto a la pieza y por lo tanto no sabes cuanto te sobresaldrá el brazo o una parte de robot. Esto se puede ver físicamente con un robot y aún y todo sería imposible posicionarlo en todas las posiciones que se puedan necesitar. De todas formas el robot se me "antoja" un poco pequeño para hacer piezas de 500x500 y mas si estas son con formas raras.
El material ya se cual dices, tampoco se su nombre pero lo utiliza mucha gente para hacer prototipos, creo.
champi87 escribió:No he entendido muy bien la idea que me has propuesto sobre el pedestal, ¿podrías especificar un poco mas?
Una imagen vale mas que mil palabras, espero ahora lo entiendas mejor.
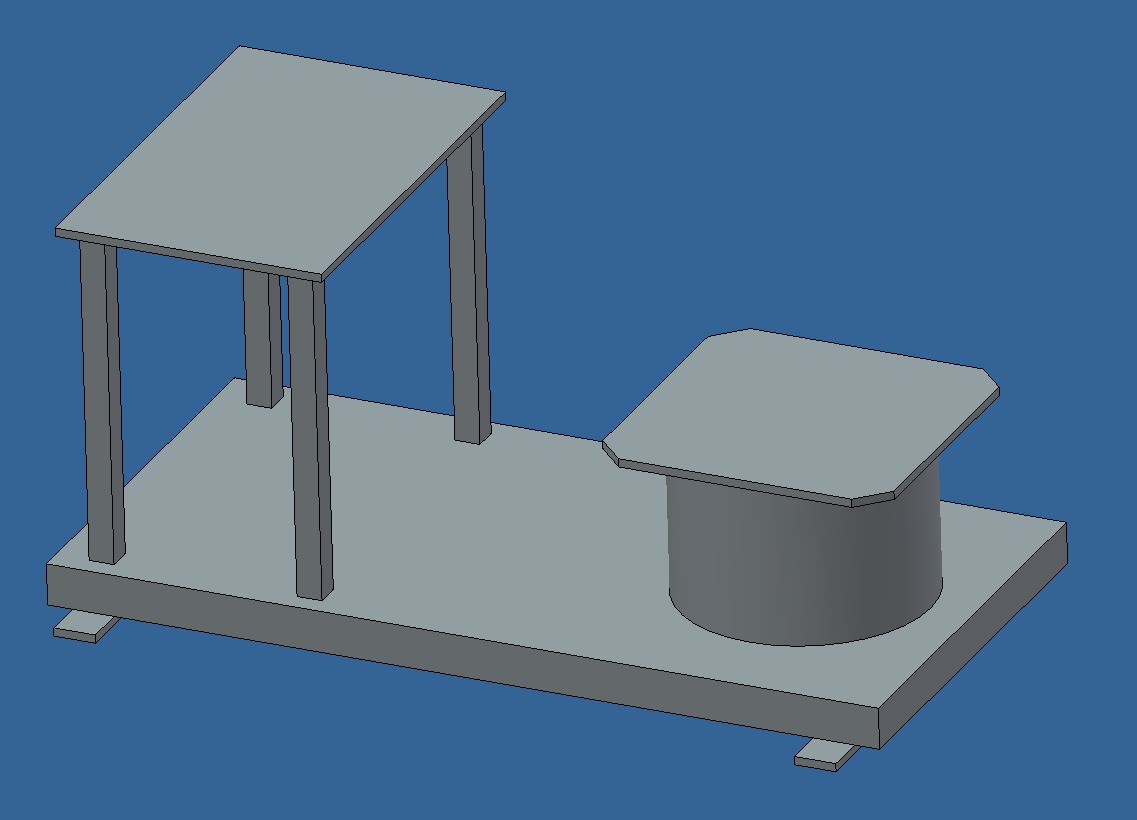
Evidentemente, la parte derecha es donde iría el robot y la parte izquierda el divisor o el utillaje para amarrar la pieza.
(Por si no sabes que es un divisor horizontal, aquí una imagen, la pieza redonda de atrás. Se puede poner horizontal o vertical, como esta en la imagen.)

Ufff, lo que tu quieres hacer con la interfaz del proceso, lo hacen en mi empresa los compañeros de automatismos, pero con un Autómata, una especie de "cerebro" que controla todo el entorno. A ver, nosotros diseñamos y fabricamos máquinas llave en mano a medida. Montamos robots, como manipuladores, como caminos de rodillos traccionados, etc, etc. Ponemos todos los elementos, un armario eléctrico con su autómata, lo cableamos y programamos todo el proceso. Secuencia de cilindros y maniobras, seguridades en puertas de acceso o zonas de carga, etc, de tal manera que si se abre una puerta, esta dispone de un micro de seguridad y para toda la instalación. También en la zona de carga, hay unas barreras de seguridad que lanzan unos rayos de una barrera hasta otra y si algo entra dentro del campo y corta uno de esos rayos, se para también toda la instalación.
A ver, el proceso es tal y como dices, sería diseñar el entorno, no conozco Robotstudio, pero creo que cualquier otro programa de CAD es mas paramétrico y mas adecuado para esta fase. Lo de paramétrico es para decirle que en lugar de 500 sea 100 y todo se redimensione. Después habría que hacer el programa de CAM y para ello solo tendrías que cargar la pieza a mecanizar, el útil que vas a usar para amarrarla y poco mas. generarías el programa y luego lo cargarías en tu instalación. Colocarías la pieza, le darías al botón de marcha y a mecanizar. Lo de los tiempos y demás datos te los facilita el programa de CAM, pero son teóricos.
champi87 escribió:y la posibilidad de que alguien sin tener ni idea de esto pueda introducir su diseño y con unos pocos url el robot sea capaz de funcionar
El día que inventes esta dispositivo, ya lo puedes patentar a toda prisa, esto no existe (que yo sepa) y creo que eso sería mucho mas complejo que hacer una instalación como la que quieres hacer. Que digo complejo, sería eterno.
Mira, un consejo, para ser lo primero, haz algo sencillo, un robot con su herramienta, el útil para poner las piezas, la protección del entorno y la programación. Lo demás, OLVíDALO, es un sueño que muchos tienen y nadie tienen dinero para hacerlo y bajo mi punto de vista, nadie hará.
En las películas queda todo muy bien, pero esto es la realidad y con los conocimientos que tienes sobre este tema, no llegarías ha hacer ni la mitad de lo que necesitas. Ojo, que conste que con mis conocimientos tampoco sería capaz de hacer mas de un 10% de lo que tu hicieses. Simplifica, no intentes hacer las cosas difíciles, sin haber hecho antes las fáciles, te lo digo por experiencia y ya son 20 años en el diseño.